KRAHË ROBOTIKË SCARA – Krah Robotik Bashkëpunues Z-Arm-2442B



Kategoria Kryesore
Krah roboti industrial / Krah roboti bashkëpunues / Kapëse elektrike / Aktuator inteligjent / Zgjidhje automatizimi
Aplikacioni
Kobotët SCIC Z-Arm janë robotë bashkëpunues të lehtë me 4 akse me motor të integruar brenda dhe nuk kërkojnë më reduktorë si robotët e tjerë tradicionalë SCIC, duke ulur koston me 40%. Kobotët SCIC Z-Arm mund të realizojnë funksione duke përfshirë, por pa u kufizuar në to, printimin 3D, trajtimin e materialeve, saldimin dhe gdhendjen me lazer. Është i aftë të përmirësojë shumë efikasitetin dhe fleksibilitetin e punës dhe prodhimit tuaj.
Karakteristikat

Saktësi e Lartë
Përsëritshmëria
±0.02 mm
Ngarkesë e madhe
5 kg
Hapësirë e madhe e krahut
Boshti JI 220 mm
Boshti J2 200 mm
Çmim konkurrues
Cilësi e nivelit industrial
Cçmim konkurrues
Produkte të Ngjashme



Parametri i Specifikimit
SCIC Z-Arm 2442B është projektuar nga SCIC Tech, është një robot bashkëpunues i lehtë, i lehtë për t’u programuar dhe përdorur, mbështet SDK. Përveç kësaj, mbështet zbulimin e përplasjeve, domethënë, do të ndalet automatikisht kur prek njeriun, që është një bashkëpunim inteligjent njeri-makinë, siguria është e lartë.
| Krahu i robotit bashkëpunues Z-Arm 2442B | Parametrat |
| Gjatësia e krahut me 1 bosht | 220 mm |
| Këndi i rrotullimit me 1 bosht | ±90° |
| Gjatësia e krahut me 2 boshte | 200 mm |
| Këndi i rrotullimit me 2 boshte | ±164° (Opsionale: 15-345 gradë) |
| Goditja e boshtit Z | 240 (Lartësia mund të personalizohet) |
| Diapazoni i rrotullimit të boshtit R | ±1080° |
| Shpejtësi lineare | 1600 mm/s (ngarkesë 4 kg) |
| Përsëritshmëria | ±0.02 mm |
| Ngarkesë standarde | 4 kg |
| Ngarkesa maksimale | 5 kg |
| Shkalla e lirisë | 4 |
| Furnizim me energji | 220V/110V50-60HZ përshtatet me fuqinë maksimale 48VDC 200W |
| Komunikimi | Ethernet |
| Zgjerueshmëria | Kontrolluesi i integruar i lëvizjes ofron 24 hyrje/dalje + zgjerim nën sqetull |
| Boshti Z mund të personalizohet në lartësi | 0.1m-0.5m |
| Mësimdhënia e zvarritjes në boshtin Z | / |
| Ndërfaqja elektrike e rezervuar | Konfigurimi standard: tela 24*23awg (të pambrojtur) nga paneli i prizës përmes mbulesës së krahut të poshtëm Opsionale: 2 tuba vakumi φ4 përmes panelit të folesë dhe flanxhës |
| Kapëse elektrike të pajtueshme HITBOT | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Dritë frymëmarrëse | / |
| Diapazoni i lëvizjes së krahut të dytë | Standard: ±164° Opsionale: 15-345 gradë |
| Aksesorë opsionalë | / |
| Përdor mjedisin | Temperatura e ambientit: 0-45°C Lagështia: 20-80%RH85 (pa ngricë) |
| Hyrja dixhitale e portës I/O (e izoluar) | Zgjatje 9+3+ e parakrahut (opsionale) |
| Dalje dixhitale e portës I/O (e izoluar) | Zgjatje 9+3+ e parakrahut (opsionale) |
| Hyrje analoge e portës I/O (4-20mA) | / |
| Dalje analoge e portës I/O (4-20mA) | / |
| Lartësia e krahut të robotit | 683 mm |
| Pesha e krahut të robotit | Pesha neto e goditjes 240 mm 27 kg |
| Madhësia bazë | 250mm*250mm*15mm |
| Distanca midis vrimave të fiksimit të bazës | 200mm*200mm me katër vida M8*20 |
| Zbulimi i përplasjes | √ |
| Mësimdhënia e tërheqjes | √ |
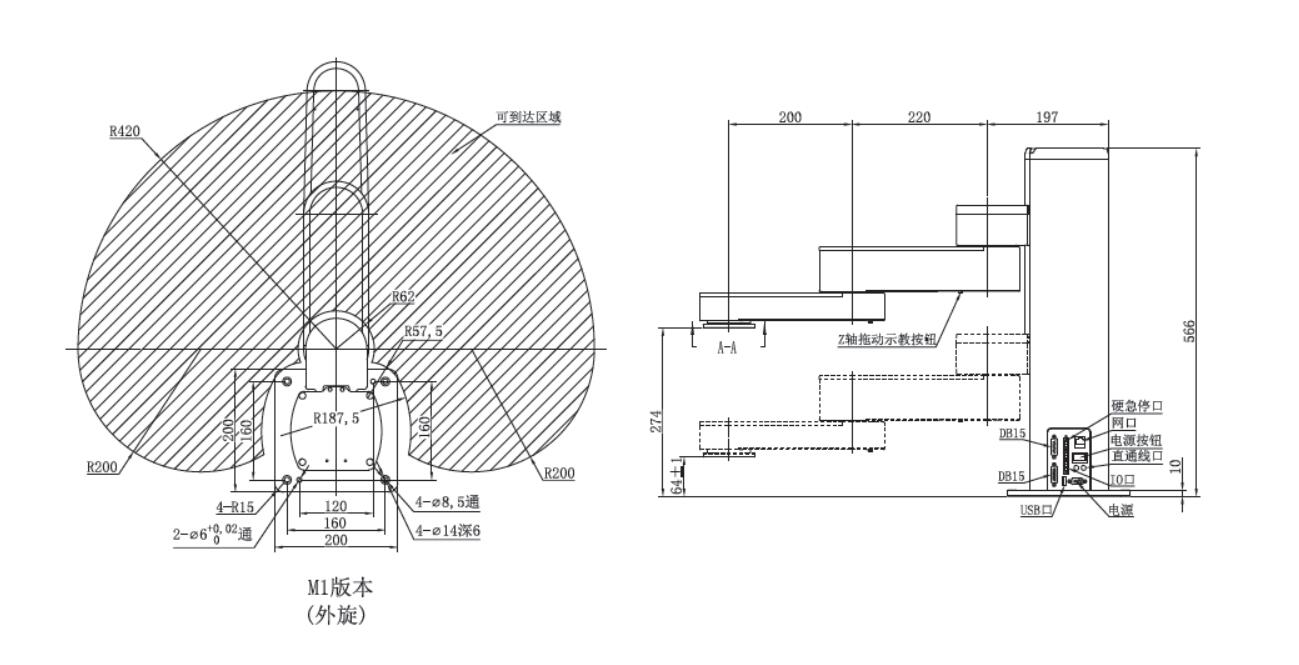
Diapazoni i Lëvizjes Versioni M1 (Rrotullohet Jashtë)
Hyrje në ndërfaqe

Ndërfaqja e krahut të robotit Z-Arm 2442 është instaluar në 2 vende, në anën e bazës së krahut të robotit (e përcaktuar si A) dhe në pjesën e pasme të krahut fundor. Paneli i ndërfaqes në A ka një ndërfaqe çelësi energjie (JI), një ndërfaqe furnizimi me energji 24V DB2 (J2), një dalje për në portën I/O të përdoruesit DB15 (J3), një portë I/O të hyrjes së përdoruesit DB15 (J4) dhe butona konfigurimi të adresës IP (K5). Portë Ethernet (J6), një portë hyrje/daljeje të sistemit (J7) dhe dy priza me tela të drejtpërdrejtë me 4 bërthama J8A dhe J9A.
Masa paraprake
1. Inercia e ngarkesës
Qendra e gravitetit të ngarkesës dhe diapazoni i rekomanduar i ngarkesës me inercinë e lëvizjes së boshtit Z tregohen në Figurën 1.

Figura 1 Përshkrimi i ngarkesës së serisë XX32
2. Forca e përplasjes
Forca shkaktuese e mbrojtjes nga përplasja e nyjeve horizontale: forca e serisë XX42 është 40N.
3. Forca e jashtme e boshtit Z
Forca e jashtme e boshtit Z nuk duhet të kalojë 120N.

Figura 2
4. Shënime për instalimin e boshtit Z të personalizuar, shihni Figurën 3 për detaje.

Figura 3
Shënim paralajmërues:
(1) Për boshtin Z të personalizuar me një goditje të madhe, ngurtësia e boshtit Z zvogëlohet ndërsa rritet goditja. Kur goditja e boshtit Z tejkalon vlerën e rekomanduar, përdoruesi ka kërkesën e ngurtësisë dhe shpejtësia është >50% e shpejtësisë maksimale, rekomandohet fuqimisht të instaloni një mbështetëse pas boshtit Z për të siguruar që ngurtësia e krahut të robotit përmbush kërkesën me shpejtësi të lartë.
Vlerat e rekomanduara janë si më poshtë: Goditja e boshtit Z të serisë Z-ArmXX42 >600 mm
(2) Pasi të rritet goditja e boshtit Z, vertikaliteti i boshtit Z dhe i bazës do të reduktohet shumë. Nëse kërkesat strikte të vertikalitetit për boshtin Z dhe referencën e bazës nuk zbatohen, ju lutemi konsultohuni veçmas me personelin teknik.
5. Ndalohet lidhja e kabllos së energjisë me prizë të nxehtë. Paralajmërim për të kundërt kur polet pozitive dhe negative të furnizimit me energji janë të shkëputura.
6. Mos e shtypni krahun horizontal kur energjia është e fikur.

Figura 4
Rekomandimi i lidhësit DB15

Figura 5
Modeli i rekomanduar: Mashkull i veshur me ar me guaskë ABS YL-SCD-15M Femër e veshur me ar me guaskë ABS YL-SCD-15F
Përshkrimi i madhësisë: 55mm*43mm*16mm
(Shihni Figurën 5)
Tavolinë e përputhshme me kapëse krahësh robotikë
| Modeli i krahut të robotit Nr. | Kapëse të pajtueshme |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA Printimi 3D me boshtin e 5-të |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
Diagrama e Madhësisë së Instalimit të Adaptorit të Energjisë
Furnizim me energji 24V 500W RSP-500-SPEC-CN me konfigurim XX42

Diagrama e Mjedisit të Përdorimit të Jashtëm të Krahut të Robotit

Biznesi ynë







